

 联系我们
联系我们

参考位置的设置方法:
MENU(菜单)-设置-参考位置:
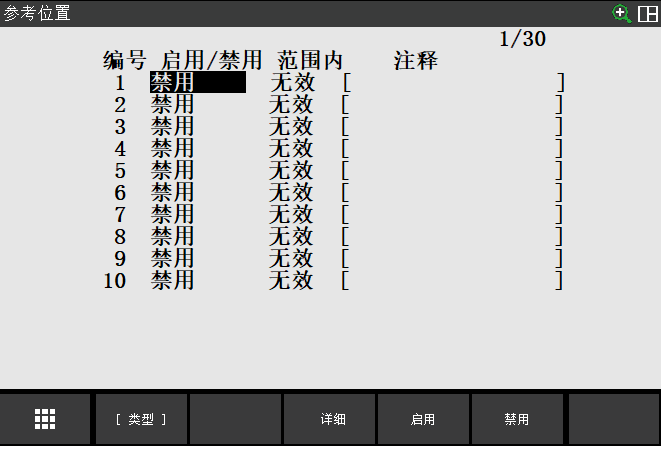
2、光标选择***个,按F3(详细)进入设置,如下图:

3、把光标移动到J1右边列,按Shift+记录,记录下机器人当前位置为所要设定的“参考位置”。如下图所示:(记录下机器人当前坐标:J1:0、J2:0、J3:0、J4:0、J5:-90、J6:0)。

4、把光标移动到***后一列(误差值),把J1-J6轴的误差值设为1(表示在这个轴的±1°之内都算满足在这个范围以内)。

5、把光标移动到“信号定义“右侧,设置一个输出端,这里设为DO101,表示机器人的位置处在这个参考位置1的范围内时,通过DO101自动向外发出信号。

6、***后,把光标移动到“启用/禁用”处,按F4设置为启用。

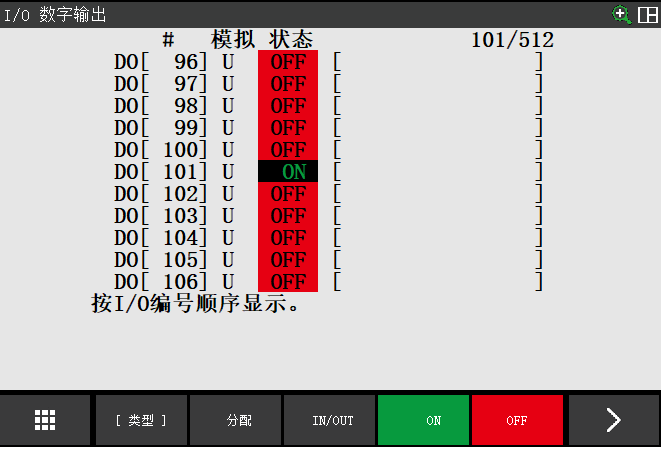
7、打开IO界面,切换到数字IO,找到DO101,因为机器人当前处在该位置,所以DO101自动输出为ON。
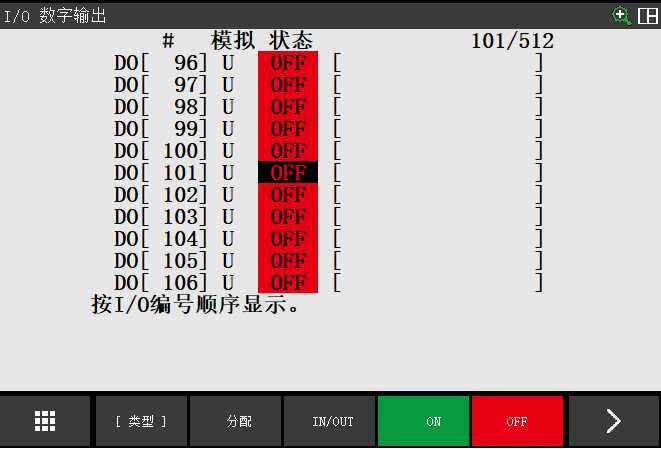
8、把机器人点动移开当前位置一段距离,看到DO101自动关闭。
9、要注意的是:1个参考位置要对应一个输出信号端,不能2个参考位置同时指定同一个输出信号端,否则会出现只有***后启用的参考位置的信号端有效输出的情况。
